- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

ການຄວບຄຸມການຊິ້ງຂອງທໍ່ໄຮໂດຼລິກຫຼາຍອັນແມ່ນບັນລຸໄດ້ແນວໃດ?
ແນະນຳ
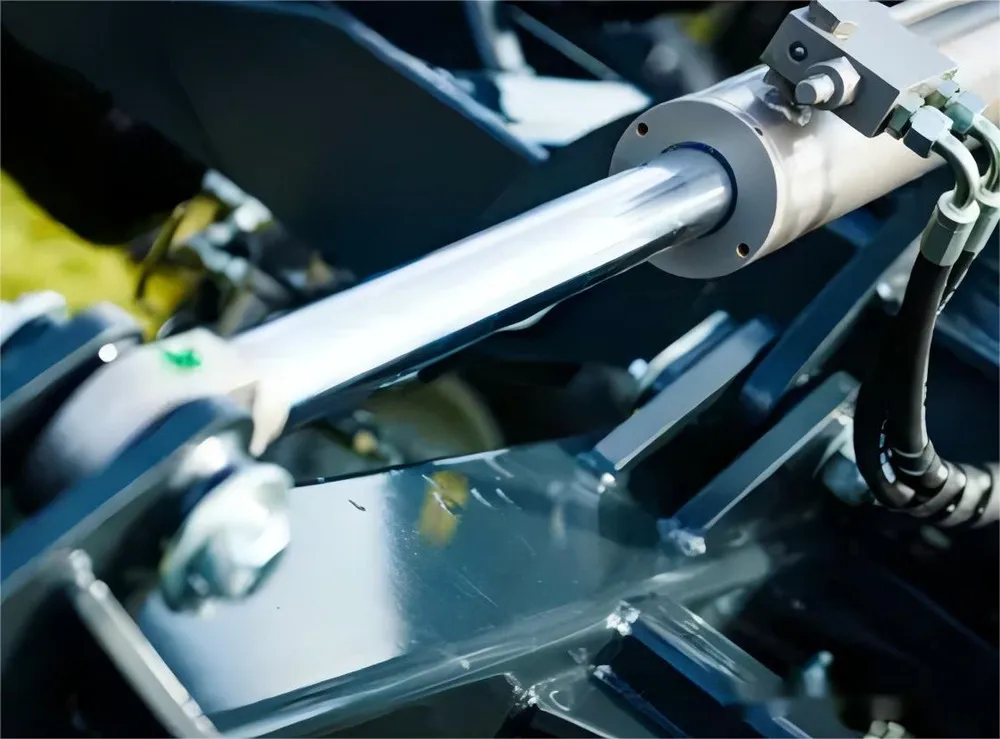
ໃນອຸປະກອນອຸດສາຫະກໍາທີ່ທັນສະໄຫມ, ລະບົບໄຮໂດຼລິກຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງສໍາລັບຫນ້າທີ່ຫລາກຫລາຍເຊັ່ນ: ການຍົກ, ການຂັບເຄື່ອນແລະການຂັບຂີ່. ໃນລະບົບເຫຼົ່ານີ້, ການດໍາເນີນງານ synchronous ຂອງກະບອກບົບໄຮໂດຼລິກຫຼາຍແມ່ນສ່ວນຫນຶ່ງທີ່ສໍາຄັນໃນການຮັບປະກັນການດໍາເນີນງານທີ່ມີປະສິດທິພາບແລະປອດໄພຂອງອຸປະກອນ. ການ synchronization ຂອງກະບອກໄຮໂດຼລິກບໍ່ພຽງແຕ່ສາມາດປັບປຸງປະສິດທິພາບການເຮັດວຽກ, ແຕ່ຍັງຫຼີກເວັ້ນຄວາມເສຍຫາຍອຸປະກອນທີ່ເກີດຈາກການເຄື່ອນໄຫວທີ່ບໍ່ສອດຄ່ອງ. ບົດຄວາມນີ້ຈະຄົ້ນຫາຫຼັກການ synchronization ຂອງທໍ່ໄຮໂດຼລິກຫຼາຍ, ວິທີການ synchronization ທົ່ວໄປ, ສິ່ງທ້າທາຍດ້ານວິຊາການ, ແລະຂໍ້ຄວນລະວັງໃນລະຫວ່າງການປະຕິບັດງານ.
ການຊິ້ງຂໍ້ມູນກະບອກສູບໄຮໂດຼລິກເຮັດວຽກແນວໃດ?
synchronization ຂອງ cylinders ບົບໄຮໂດຼລິກຫມາຍຄວາມວ່າ cylinders ຫຼາຍຂະຫຍາຍຫຼືສັນຍາໃນຄວາມໄວດຽວກັນແລະຜົນບັງຄັບໃຊ້ໃນເວລາດຽວກັນ. ຫຼັກແມ່ນຢູ່ໃນການແຜ່ກະຈາຍເປັນເອກະພາບຂອງນ້ໍາໄຮໂດຼລິກແລະການຄວບຄຸມທີ່ຊັດເຈນຂອງຄວາມກົດດັນ. ການປະຕິບັດຕົວຈິງຂອງ synchronous ແມ່ນຂຶ້ນກັບປັດໃຈສໍາຄັນຕໍ່ໄປນີ້:

(1) ການເຄື່ອນໄຫວຂອງນ້ໍາ
ຫຼັກການພື້ນຖານຂອງລະບົບໄຮໂດຼລິກແມ່ນການໃຊ້ການບີບອັດຂອງແຫຼວເພື່ອປ່ຽນຄວາມກົດດັນເປັນພະລັງງານ. ການເຄື່ອນໄຫວ synchronous ຂອງກະບອກແມ່ນບັນລຸໄດ້ໂດຍການຄວບຄຸມທິດທາງແລະການໄຫຼຂອງຂອງແຫຼວ.
(2) ການດຸ່ນດ່ຽງການໂຫຼດ
ເມື່ອກະບອກໄຮໂດຼລິກຫຼາຍຖັງແບ່ງປັນການໂຫຼດ, ໃຫ້ແນ່ໃຈວ່າແຕ່ລະກະບອກແມ່ນໄດ້ຮັບການໂຫຼດດຽວກັນເພື່ອຫຼີກເວັ້ນການ asynchronism ທີ່ເກີດຈາກການໂຫຼດທີ່ບໍ່ສະເຫມີກັນ.
(3) ຄໍາຕິຊົມໃນເວລາທີ່ແທ້ຈິງ
ຜ່ານເຊັນເຊີແລະລະບົບການຄວບຄຸມ, ສະຖານະການເຄື່ອນທີ່ຂອງແຕ່ລະກະບອກແມ່ນຕິດຕາມໃນເວລາທີ່ແທ້ຈິງ, ແລະການປັບຕົວແມ່ນເຮັດຕາມຄວາມຈໍາເປັນເພື່ອຮັກສາ synchronization.
ວິທີການທົ່ວໄປສໍາລັບການ synchronizing ທໍ່ໄຮໂດຼລິກ?
(1) ການເຊື່ອມຕໍ່ກົນຈັກ
ການເຊື່ອມໂຍງກົນຈັກເປັນວິທີທີ່ຈະບັນລຸການ synchronization ໂດຍຜ່ານການເຊື່ອມຕໍ່ທາງດ້ານຮ່າງກາຍ. ໃນລະບົບນີ້, ທໍ່ໄຮໂດຼລິກຫຼາຍທໍ່ແມ່ນເຊື່ອມຕໍ່ກັນໂດຍຜ່ານອົງປະກອບກົນຈັກ, ເຊັ່ນ: ທໍ່ synchronization ຫຼືລະບົບເກຍ. ການເຊື່ອມຕໍ່ທາງດ້ານຮ່າງກາຍເຮັດໃຫ້ແນ່ໃຈວ່າການຍ້າຍຂອງແຕ່ລະກະບອກແມ່ນແທ້ດຽວກັນໃນເວລາທີ່ກະບອກຍ້າຍ. ວິທີການນີ້ມັກຈະຖືກນໍາໃຊ້ໃນຄໍາຮ້ອງສະຫມັກທີ່ຄວາມຖືກຕ້ອງຂອງ synchronization ແມ່ນບໍ່ສູງ, ແລະເຫມາະສົມສໍາລັບສະຖານະການຄໍາຮ້ອງສະຫມັກທີ່ງ່າຍດາຍແລະລາຄາຖືກ.
(2) ຕົວແທນຈໍາຫນ່າຍ Flow
ຕົວແຈກຢາຍການໄຫຼວຽນຂອງນ້ໍາມັນໄຮໂດຼລິກໄຫຼເທົ່າທຽມກັນໃນແຕ່ລະກະບອກໄຮໂດຼລິກ. ໂດຍການປັບການຕັ້ງຄ່າຂອງຜູ້ຈັດຈໍາຫນ່າຍ, ມັນສາມາດຮັບປະກັນວ່າແຕ່ລະກະບອກໄດ້ຮັບການໄຫຼດຽວກັນ, ດັ່ງນັ້ນຈຶ່ງບັນລຸການ synchronization. ວິທີການນີ້ມັກຈະຖືກນໍາໃຊ້ໃນລະບົບໄຮໂດຼລິກທີ່ເຊື່ອມຕໍ່ແບບຂະຫນານ, ເຊັ່ນຄໍາຮ້ອງສະຫມັກທີ່ທໍ່ໄຮໂດຼລິກຫຼາຍທໍ່ຍົກວັດຖຸຫນັກຮ່ວມກັນ.

(3) ເຊັນເຊີຕໍາແຫນ່ງ
ເມື່ອຕ້ອງການ synchronization ຄວາມແມ່ນຍໍາສູງ, ເຊັນເຊີຕໍາແຫນ່ງແລະລະບົບການຄວບຄຸມຄໍາຄຶດຄໍາເຫັນສາມາດເລືອກໄດ້. ແຕ່ລະກະບອກບົບໄຮໂດຼລິກມີການຕິດຕັ້ງເຊັນເຊີຕໍາແຫນ່ງເພື່ອຕິດຕາມກວດກາການຍ້າຍຖິ່ນຖານໃນເວລາທີ່ແທ້ຈິງຂອງມັນແລະສົ່ງຂໍ້ມູນນີ້ໄປຫາຜູ້ຄວບຄຸມໂດຍຜ່ານລະບົບການຄວບຄຸມຄໍາຄຶດຄໍາເຫັນ. ຕົວຄວບຄຸມໄດ້ປັບປ່ຽງປ່ຽງໄຮໂດຼລິກໂດຍອີງໃສ່ຂໍ້ມູນຄໍາຕິຊົມເພື່ອຮັບປະກັນວ່າການເຄື່ອນໄຫວຂອງແຕ່ລະກະບອກໄຮໂດຼລິກຈະຖືກ synchronized ສະເຫມີ. ປະໂຫຍດແມ່ນວ່າມັນສາມາດບັນລຸຄວາມຖືກຕ້ອງຂອງ synchronization ສູງທີ່ສຸດໂດຍຜ່ານຄໍາຄຶດຄໍາເຫັນໃນເວລາທີ່ແທ້ຈິງແລະສາມາດປັບຕົວກັບການປ່ຽນແປງແບບເຄື່ອນໄຫວໃນການໂຫຼດ. ຂໍ້ເສຍແມ່ນວ່າລະບົບມີຄວາມຊັບຊ້ອນສູງ, ອີງໃສ່ອົງປະກອບເອເລັກໂຕຣນິກ, ແລະມີຄວາມຕ້ອງການດ້ານວິຊາການສູງສໍາລັບການຕິດຕັ້ງ, ການມອບຫມາຍແລະການບໍາລຸງຮັກສາ.
(4) ວາວໄຮໂດຼລິກການຄວບຄຸມ Diverter Valve
ປ່ຽງ Diverter ມີບົດບາດສໍາຄັນໃນລະບົບໄຮໂດຼລິກ, ໃຫ້ແນ່ໃຈວ່າການໄຫຼເຂົ້າທີ່ສະຫນອງໂດຍແຫຼ່ງນ້ໍາມັນດຽວສາມາດແຈກຢາຍຢ່າງເທົ່າທຽມກັນຫຼືອັດຕາສ່ວນກັບຕົວກະຕຸ້ນຫຼາຍຕາມຄວາມຕ້ອງການ. ເຫມາະສໍາລັບການຄວບຄຸມ synchronous ຂອງທໍ່ໄຮໂດຼລິກຫຼາຍ, ໂດຍການຄວບຄຸມການແຜ່ກະຈາຍການໄຫຼຢ່າງຖືກຕ້ອງ, ໃຫ້ແນ່ໃຈວ່າແຕ່ລະຕົວກະຕຸ້ນ (ເຊັ່ນ: ທໍ່ໄຮໂດຼລິກ) ຮັກສາຄວາມໄວດຽວກັນ. ປ່ຽງທີ່ມີອັດຕາສ່ວນ: ປ່ຽງທີ່ມີຄວາມແມ່ນຍໍາເຫຼົ່ານີ້ອະນຸຍາດໃຫ້ມີການຄວບຄຸມການໄຫຼແລະຄວາມກົດດັນຂອງນ້ໍາມັນໄຮໂດຼລິກທີ່ຊັດເຈນ, ແລະສົມທົບການປ້ອນສັນຍານເອເລັກໂຕຣນິກເພື່ອບັນລຸການ synchronization ທີ່ຖືກຕ້ອງຫຼາຍຂຶ້ນ. ປົກກະຕິແລ້ວພວກມັນຖືກລວມເຂົ້າກັບເຊັນເຊີແລະລະບົບການຄວບຄຸມເພື່ອປັບການປະຕິບັດຂອງແຕ່ລະກະບອກໄຮໂດຼລິກໃນເວລາທີ່ແທ້ຈິງ.

ສິ່ງທ້າທາຍດ້ານເຕັກນິກຂອງການຊິງຄ໌ກະບອກໄຮໂດຼລິກ?
(1) ການໂຫຼດທີ່ບໍ່ສົມດຸນ
ເມື່ອກະບອກສູບໄຮໂດຼລິກຫຼາຍໜ່ວຍແບ່ງປັນການໂຫຼດ, ການແຈກຢາຍການໂຫຼດບໍ່ສະໝ່ຳສະເໝີອາດເຮັດໃຫ້ເກີດການເຄື່ອນໄຫວທີ່ບໍ່ສອດຄ່ອງກັນລະຫວ່າງກະບອກສູບ. ສໍາລັບຕົວຢ່າງ, ໃນການດໍາເນີນງານການຍົກ, ຖ້າກະບອກສູບໄດ້ຮັບການໂຫຼດຂະຫນາດໃຫຍ່, ມັນອາດຈະເຮັດໃຫ້ຄວາມໄວຂອງມັນຊ້າລົງ. ດັ່ງນັ້ນ, ການນໍາໃຊ້ປ່ຽງຄວບຄຸມການໄຫຼຫຼືວາວ counterbalance ສາມາດຫຼຸດຜ່ອນບັນຫາການໂຫຼດທີ່ບໍ່ສົມດຸນຢ່າງມີປະສິດທິພາບ.
(2) ການເໜັງຕີງຂອງອຸນຫະພູມ ແລະຄວາມກົດດັນ
ການປ່ຽນແປງອຸນຫະພູມຂອງນ້ໍາມັນໄຮໂດຼລິກມີຜົນກະທົບຕໍ່ຄວາມຫນືດຂອງມັນ, ເຊິ່ງສົ່ງຜົນກະທົບຕໍ່ຄວາມໄວການຕອບສະຫນອງຂອງກະບອກສູບ. ອຸນຫະພູມສູງອາດຈະເຮັດໃຫ້ນ້ໍາມັນໄຮໂດຼລິກໄຫຼຫຼາຍ, ໃນຂະນະທີ່ອຸນຫະພູມຕ່ໍາອາດຈະເພີ່ມຄວາມຫນືດຂອງນ້ໍາມັນໄຮໂດຼລິກ. ນອກຈາກນັ້ນ, ການເຫນັງຕີງຂອງຄວາມກົດດັນອາດຈະເຮັດໃຫ້ເກີດການເຄື່ອນໄຫວທີ່ບໍ່ສອດຄ່ອງຂອງກະບອກສູບ, ດັ່ງນັ້ນອຸນຫະພູມແລະຄວາມກົດດັນຕ້ອງໄດ້ຮັບການຕິດຕາມແລະປັບຕົວເປັນປະຈໍາ.

(3) ການສວມໃສ່ແລະອາຍຸ
ດ້ວຍການເພີ່ມເວລາຂອງການນໍາໃຊ້, ທໍ່ໄຮໂດຼລິກແລະອົງປະກອບຂອງພວກມັນຈະສວມໃສ່, ເຊິ່ງອາດຈະເຮັດໃຫ້ເກີດການເຄື່ອນໄຫວທີ່ບໍ່ສະຫມໍ່າສະເຫມີແລະຜົນກະທົບຕໍ່ການ synchronization. ດັ່ງນັ້ນ, ການບໍາລຸງຮັກສາແລະການກວດກາເປັນປົກກະຕິແມ່ນມີຄວາມຈໍາເປັນເພື່ອຮັບປະກັນວ່າລະບົບຢູ່ໃນສະພາບດີ.
(4) ຄວາມສັບສົນຂອງລະບົບການຄວບຄຸມ
ເຖິງແມ່ນວ່າລະບົບການຄວບຄຸມສະຫນອງຄວາມຖືກຕ້ອງສູງ, ຄວາມສັບສົນແລະຄວາມລົ້ມເຫລວທີ່ອາດຈະເກີດຂື້ນສາມາດເຮັດໃຫ້ເກີດສິ່ງທ້າທາຍຕໍ່ການດໍາເນີນງານ. ຜູ້ປະຕິບັດງານຈໍາເປັນຕ້ອງມີທັກສະທີ່ສອດຄ້ອງກັນເພື່ອແກ້ໄຂແລະຮັກສາລະບົບເຫຼົ່ານີ້.
ສະຫຼຸບ
(1) ເຊັກອິນລ່ວງໜ້າ
ກ່ອນທີ່ຈະດໍາເນີນການ synchronous, ໃຫ້ແນ່ໃຈວ່າຈະກວດເບິ່ງສະພາບຂອງທໍ່ໄຮໂດຼລິກທັງຫມົດ, ລວມທັງກະບອກ, ປະທັບຕາແລະທໍ່ນ້ໍາມັນເພື່ອຮັບປະກັນວ່າບໍ່ມີການສວມໃສ່ຫຼືຮົ່ວໄຫຼ.
(2) ກໍານົດການໄຫຼແລະຄວາມກົດດັນທີ່ສົມເຫດສົມຜົນ
ໃຫ້ແນ່ໃຈວ່າການໄຫຼແລະຄວາມກົດດັນຂອງລະບົບໄຮໂດຼລິກຖືກກໍານົດຢູ່ໃນຂອບເຂດທີ່ສົມເຫດສົມຜົນເພື່ອຫຼີກເວັ້ນການເຄື່ອນທີ່ຂອງກະບອກສູບທີ່ບໍ່ສອດຄ່ອງເນື່ອງຈາກການໄຫຼບໍ່ພຽງພໍຫຼືການໂຫຼດເກີນ.
(3) ຕິດຕາມການປ່ຽນແປງອຸນຫະພູມ
ໃນລະຫວ່າງການປະຕິບັດງານ, ການປ່ຽນແປງອຸນຫະພູມຂອງນ້ໍາມັນໄຮໂດຼລິກຄວນໄດ້ຮັບການຕິດຕາມເພື່ອປ້ອງກັນບໍ່ໃຫ້ເກີດຄວາມຮ້ອນເກີນໄປຫຼືອຸນຫະພູມຕ່ໍາຜົນກະທົບຕໍ່ການເຮັດວຽກຂອງລະບົບ.
(4) ເອົາໃຈໃສ່ກັບຄໍາສັ່ງຂອງການດໍາເນີນງານ
ໃນລະຫວ່າງການປະຕິບັດການ synchronous, ໃຫ້ແນ່ໃຈວ່າກະບອກບົບໄຮໂດຼລິກໄດ້ຖືກປະຕິບັດໃນຄໍາສັ່ງທີ່ຖືກຕ້ອງເພື່ອຫຼີກເວັ້ນການບັນຫາ asynchronous ທີ່ເກີດຈາກການເຮັດວຽກທີ່ບໍ່ຖືກຕ້ອງ.
(5) ການປັບທັນເວລາແລະການແກ້ໄຂ
ໃນລະຫວ່າງການປະຕິບັດງານ synchronous, ຖ້າຫາກວ່າກະບອກສູບໄດ້ຖືກພົບເຫັນວ່າຊັກຊ້າຫຼືຂ້າງຫນ້າ, ການໄຫຼແລະຄວາມກົດດັນຄວນໄດ້ຮັບການປັບໃນເວລາທີ່ຈະຟື້ນຟູສະພາບ synchronous.